U symetrické matice stačí znát pouze prvky na diagonále a pod ní
U symetrické matice stačí znát prvků na diagonále a prvků na jedné straně diagonály (nad nebo pod). Hodnoty prvků na opačné straně diagonály lze odvodit ze symetrie matice. Symetrická matice může mít nejvýše
různých prvků. Ve srovnání s nesymetrickými maticemi řádu , které mohou mít až různých prvků, jde zhruba o poloviční množství dat, a proto byly pro symetrické matice navrženy speciální formáty pro ukládání v počítači. [1]
Součet
Součet dvou symetrických matic je vždy symetrická matice, protože
.
Stejně tak i skalární násobek symetrické matice skalárem je opět symetrická matice. Protože je nulová matice také symetrická, tvoří množina symetrických matic řádu vektorový podprostor
prostoru čtvercových matic . Tento podprostor má dimenzi. Jeho bázi lze vytvořit z matic pro , a součtů pro . Uvedené matice tvoří standardní bázi prostoru , čili mají jediný nenulový prvek .
Rozklad
Pokud je charakteristika tělesa různá od 2, lze libovolnou čtvercovou matici zapsat jednoznačně jako součet , kde matice je symetrická a matice je antisymetrická:
a
Antisymetrické matice tvoří vektorový podprostor prostoru čtvercových matic. Značí se a má dimenzi . Prostor čtvercových matic dimenze lze vyjádřit jako direktní součet
prostorů symetrických a antisymetrických matic.
Součin
Součin dvou symetrických matic nemusí být opět symetrická matice. Součin symetrických matic je symetrický, právě když je součin a komutativní. Jinými slovy, pokud součin splňuje , pak také platí:
.
Pro symetrickou matici proto platí, že symetrické jsou všechny její mocniny , kde , i její maticová exponenciála .
Pro každou matici jsou matice typu , i matice typu symetrické.
Kongruence a podobnost
Každá matice , která je kongruentní symetrické matici , je také symetrická, protože platí
,
přičemž je odpovídající regulární matice.
Na druhou stranu existují i nesymetrické matice, které jsou podobné symetrické matici.
Inverze
Pokud je symetrická matice regulární, potom matice k ní inverzní je symetrická, protože pro ni platí:
.
V tomto případě jsou symetrické všechny mocniny pro .
Reálné symetrické matice
Symetrické matice s reálnými prvky mají řadu dalších vlastností.
Normální matice
Reálná symetrická matice je normální, protože platí
.
Každá reálná symetrická matice komutuje se svou transpozicí. Existují však i normální matice, které nejsou symetrické, například antisymetrické matice.
Hermitovské matice
Protože se na každé číslo shoduje se svým komplexně sdruženým protějškem, neboli , splývají reálné symetrické matice s reálnými hermitovskými. Formálně:
Reálná symetrická matice je vždy hermitovská mimo jiné i proto, že vzhledem k standardnímu skalárnímu součinu na splňuje:
pro všechny vektory . Reálné symetrické matice jsou hermitovské i s ohledem na standardní skalární součin nad .
Vlastní čísla
Jednotková kružnice je transformována na elipsu pomocí reálné symetrické matice řádu 2. Poloosy elipsy odpovídají vlastním vektorům matice a jejich délky vlastním číslům.
Vlastní čísla reálné symetrické matice , tedy řešení rovnice, jsou vždy reálná. Kdyby bylo komplexní vlastní číslo matice příslušné netriviálnímu vlastnímu vektoru, , pak z toho, že je hermitovská plyne:
.
Protože pro každé platí , musí vlastní číslo splňovat , a proto je reálné. V důsledku lze i příslušný vlastní vektor zvolit reálný.
Násobnosti vlastních čísel
Pro každou reálnou symetrickou matici se algebraické a geometrické násobnosti všech vlastních čísel shodují. Důvod je následující. Pro vlastní číslo matice s geometrickou násobností existuje ortonormální báze prostoru vlastních vektorů příslušných k . Tuto bázi lze rozšířit pomocí vektorů na ortonormální bázi celého prostoru . S pomocí ortogonální matice je matice převedena na podobnou
což je bloková diagonální matice s bloky a . Vzhledem k tomu, že matice je hermitovská a vektory tvoří ortonormální bázi, platí pro prvky matice s indexy , že:
,
kde je Kroneckerovo delta. Vektory nejsou podle předpokladu vlastní vektory matice příslušné vlastnímu číslu , proto není žádným vlastním číslem matice . Vlastní číslo matice má podle vzorce pro determinantblokových matic shodnou algebraickou i geometrickou násobnost . Totéž platí i pro matici díky vzájemné podobnosti s maticí . [2]
Diagonalizovatelnost
Vzhledem k tomu, že se algebraické a geometrické násobnosti všech vlastních čísel shodují, a protože vlastní vektory příslušné různým vlastním číslům jsou lineárně nezávislé, tvoří vlastní vektory reálné symetrické matice bázi prostoru . Reálná symetrická matice je tedy vždy diagonalizovatelná, to znamená, že existuje regulární matice a diagonální maticesplňující:
Matice je sestavena z vlastních vektorů po sloupcích a matice má vlastní čísla příslušná těmto vlastním vektorům na diagonále. Vzhledem k tomu, že sloupce matice , neboli vlastní vektory lze libovolně přerovnat, může být odpovídající pořadí prvků na diagonále libovolné. V důsledku si dvě reálné symetrické matice jsou podobné, právě když mají stejná vlastní čísla. Kromě toho jsou dvě reálné symetrické matice současně diagonalizovatelné, právě když spolu komutují.
Ortogonální diagonalizace
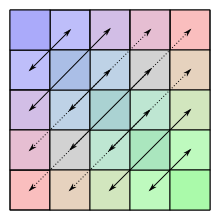
U symetrických matic platí, že vlastní vektory (modrý a fialový) příslušné různým vlastním číslům (zde 3 a 1) jsou na sebe kolmé. Při provedení transformace odpovídající matici se modré vektory třikrát prodlouží, zatímco fialové vektory si svou délku zachovají.
Vlastní vektory příslušné dvěma různým vlastním číslům reálné symetrické matici jsou vzájemně kolmé. Uvedený vztah opět z následující vlastnosti hermitovských matic :
.
Z předpokladu, že a jsou různá, pak plyne . Vlastní vektory tvoří ortonormální bázi prostoru . Každou reálnou symetrickou matici lze proto ortogonálně diagonalizovat, neboli existuje ortogonální matice splňující:
Tato reprezentace tvoří základ pro transformaci hlavní osy a je nejjednodušší verzí spektrální věty.
Parametry
Každá reálná symetrická matice diagonalizovatelná, a proto pro její stopu platí:
nazývá kvadratická forma určená maticí . Podle toho, jestli je pro všechna kladná, resp. nezáporná, záporná či nekladná, nazývá se matrice pozitivně definitní, resp. pozitivně semidefinitní, negativně definitní nebo negativně semidefinitní. Pokud nabývá kladných i záporných hodnot, nazývá se matice indefinitní. Definitnost reálné symetrické matice závisí na znaméncích jejích vlastních čísel. Pokud jsou všechna vlastní čísla kladná, je matice pozitivně definitní, pokud jsou všechna záporná, je matice negativně definitní atd. Trojice čísel daná počtem kladných, záporných a nulových vlastních čísel se nazývá signatura matice. Podle Sylvesterova zákona setrvačnosti je signatura zachována u kongruentních reálných symetrických matic.
Odhady vlastních čísel
Podle Courant-Fischerovy věty lze nejmenší a největší vlastní číslo symetrické odhadnout pomocí Rayleighova kvocientu. Konkrétně, pro všechna netriviální platí:
Rovnost platí, právě když je je vlastní vektor příslušný k danému vlastnímu číslu. V důsledku lze nejmenší a největší vlastní číslo reálné symetrické matice určit minimalizací nebo maximalizací Rayleighova kvocientu.
Další možnost pro odhad vlastních čísel nabízejí Geršgorinovy kruhy, které u reálných symetrických matic mají tvar intervalů.
Pro dvě reálné symetrické matice s vlastními čísly seřazenými sestupně a platí odhad
Podobně jako u reálných matic lze prostor komplexních čtvercových matic zapsat jako direktní součet prostorů symetrických a antisymetrických matic:
Jde zároveň o ortogonální součet vzhledem k Frobeniově skalárnímu součinu, protože pro všechny matice a platí:
z čehož vyplývá . Ortogonalita rozkladu platí i pro reálný maticový prostor .
Spektrum
Pro komplexní matice nemá symetrie žádný zvláštní vliv na spektrum matice. Komplexní symetrická matice může mít nereálná vlastní čísla. Například komplexní symetrická matice má dvě vlastní čísla .
Existují komplexní symetrické matice, které nelze diagonalizovat. Například matice má jediné vlastní číslo s algebraické násobnosti dvě a geometrické násobnosti jedna. Obecně platí, že jakákoli komplexní čtvercová matice je podobná komplexní symetrické matici. Spektrum komplexní symetrické matice proto nevykazuje žádné zvláštnosti. [4]
Komplexním rozšířením reálných symetrických matic, pokud jde o matematické vlastnosti, jsou hermitovské matice.
Rozklad
Libovolnou komplexní symetrickou matici lze pomocí Autonne-Takagiho faktorizace rozložit na součin
Každá bilineární forma na vektorovém prostoru dimenze nad tělesem může být vzhledem k bázi prostoru reprezentována čtvercovou maticí danou vztahem:
Pokud je bilineární forma symetrická, pak platí pro všechny , a matice je symetrická. Naopak každá symetrická matice definuje symetrickou bilineární formu vztahem:
kde pro . Matice zobrazení je symetrická, právě když je zobrazení samoadjungované. To vyplývá ze vztahu
,
kde a jsou vektory souřadnic vektorů a .
Projekce a souměrnost
Ortogonální rozklady jsou popsány symetrickými maticemi
Je-li opět reálný prostor se skalárním součinem dimenze a je jeho -dimenzionální podprostor, přičemž jsou vektory ortonormální báze prostoru , potom matice kolmé projekce na podprostor je
.
Tato matice je symetrická, neboť je dána součtem symetrických matic. Také matice kolmé projekce do ortogonálního doplňku je díky reprezentaci vždy symetrická. S pomocí matic projekcí a může být libovolný vektor rozložen na součet vzájemně kolmých vektorů a . Geometrická transformace souměrnosti podle podprostoru má symetrickou matici .
s ortogonální maticí a pozitivní semidefinitní symetrickou maticí . Matice je druhá odmocnina z . Pokud je regulární, je pozitivně definitní a polární rozklad je pak dán .
Aplikace
Geometrie
Kvadriky lze popsat symetrickými maticemi
Kvadrika v -rozměrném euklidovském prostoru je množina kořenů kvadratického polynomu v neznámých. Každou kvadriku lze definovat pomocí nenulové symetrické matice , vektoru a absolutního členu jako množinu bodů
Hessova matice je podle Schwarzovy věty symetrická. Podle toho, jestli je je pozitivně definitní, negativně definitní nebo indefinitní leží v bodě lokální minimum, lokální maximum nebo sedlový bod.
Teorie grafů
Neorientovaný hranově vážený graf má symetrickou matici sousednosti.
Matice sousednosti neorientovaného hranově váženého grafu s množinou vrcholů je z definice
, kde
vždy symetrická. Matice odvozené z matice sousednosti součty nebo mocninami, jako například Laplaceova matice, matice sousednosti nebo matice vzdálenosti jsou také symetrické. Analýza těchto matic je předmětem spektrální teorie grafů.
Stochastika
Je-li náhodný vektor sestávající z reálných náhodných veličin s konečným rozptylem, pak přidružená kovarianční matice
je matice všech párových kovariancí těchto náhodných veličin. Protože pro všechna platí: , je kovarianční matice symetrická.
Symetrizovatelná matice
Čtvercová matice se nazývá symetrizovatelná, pokud existuje regulární diagonální matice a symetrická matice takové, že .
Transpozice symetrizovatelné matice je symetrická, protože a je symetrická.
Matice je symetrizovatelná, právě když jsou splněny následující podmínky:
implikuje pro všechna a
pro jakoukoli konečnou posloupnost
Odkazy
Reference
V tomto článku byly použity překlady textů z článků Symmetrische Matrix na německé Wikipedii a Symmetric matrix na anglické Wikipedii.
↑ÜBERHUBER, Christoph W. Computer-Numerik. 2. vyd. [s.l.]: Springer, 1995. S. 401 a násl..
↑HOWARD, Anton; RORRES, Chris. Elementary Linear Algebra: Applications Version. [s.l.]: John Wiley & Sons, 2010. S. 404–405.
↑BORWEIN, Jonathan M.; LEWIS, Adrian S. Convex Analysis and Nonlinear Optimization: Theory and Examples. [s.l.]: Springer, 2010. ISBN978-0-387-31256-9. S. 10.
↑HORN, Roger A.; JOHNSON, Charles R. Johnson. [s.l.]: Cambridge University Press, 2012. S. 271.
↑HORN, Roger A.; JOHNSON, Charles R. Johnson. [s.l.]: Cambridge University Press, 2012. S. 153.
Literatura
Slovník školské matematiky. Praha: SPN, 1981. 240 s.
BÄRTSCH, Hans-Jochen. Matematické vzorce. Praha: Academia, 2006. 832 s. ISBN80-200-1448-9. Kapitola Matice, s. 180–198.