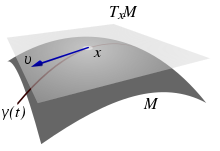
En geometría diferencial, llamamos espacio tangente al conjunto asociado a cada punto de una variedad diferenciable formado por todos los vectores tangentes a dicho punto (véase fig.1). Es un espacio vectorial de la misma dimensión que la dimensión de la variedad.
El plano que toca a la esfera en un solo punto es llamado plano tangente. Cada punto de la esfera tiene asociado un plano tangente. Para la esfera los puntos antipodales tiene planos tangente paralelos.
El conjunto de todos los espacios tangentes, debidamente topologizado, forma el llamado fibrado tangente. Resulta ser en sí mismo otra variedad de dimensión doble de la dimensión de la variedad de entrada.
fig.1 Las cartas que cumplan esta condición formarán parte de dicha estructura. Ilustración del espacio tangente y un vector tangente obtenido utilizando una curva que pasa por un punto .
Definiciones
Hay varias formas de entender este concepto. Primero vamos a explicar utilizando la gráfica de la fig.1. Empecemos suponiendo que tenemos una curva en la variedad M que pasa por alguna posición elegida cualquiera: . Es decir una aplicación diferenciable que satisface y . Resulta que el conjunto de todos estos vectores tangentes a la curva en el punto x forman el espacio tangente de x en M.
Espacio tangente
Si se tiene una variedad diferencial inmersa en dada por la ecuación entonces el espacio tangente en un punto de dicha variedad viene dado por la ecuación:
Donde es la matriz jacobiana o diferencial de la función.




![{\displaystyle \scriptstyle \gamma \ :\ [-\varepsilon ,\varepsilon ]\to M}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9b4adae6df09d4f6013592c86393fd3f8e074f76)








 Datos: Q909601
Datos: Q909601 Multimedia: Tangent space / Q909601
Multimedia: Tangent space / Q909601





